Comment les voitures autonomes utilisent la technologie CNN

Enfant, j'adorais regarder des films d'animation avec des voitures qui semblaient se conduire toutes seules. Cela m’a fait me demander si de telles voitures pouvaient être réelles et s’il y avait de minuscules robots à l’intérieur qui les conduisaient comme par magie.
À mesure que nous vieillissons, les voitures autonomes deviennent une réalité ! Je suis vraiment fasciné par eux. Comprennent-ils quand s’arrêter aux panneaux d’arrêt et aux feux rouges, par exemple ? Peuvent-ils même voir des animaux et des gens se promener sur la route ? Et qu'en est-il de conduire quand il fait noir dehors ou quand le temps est pluvieux ou enneigé ?

Parlons de voitures autonomes ! Ce sont des voitures qui peuvent se conduire seules sans conducteur humain. Des entreprises comme Tesla et Waymo utilisent des techniques informatiques intelligentes, comme l'apprentissage en profondeur, pour rendre ces voitures super intelligentes. L'apprentissage profond aide les voitures à faire des choses sympas, comme comprendre les panneaux de signalisation et conduire en toute sécurité même lorsque la météo est épouvantable. Il s’agit d’utiliser une technologie de pointe pour façonner la façon dont nous nous déplacerons à l’avenir !
History
L’histoire des automobiles autonomes s’apparente à une longue et passionnante aventure. Imaginez les années 1920, lorsque les véhicules autonomes n’étaient encore qu’un rêve pour les gens. Un esprit inventif, François Houdina, s'est démarqué en créant une voiture qui suivait les lignes de la route. Cependant, il lui fallait des fils spéciaux cachés sous la route pour le guider.

Dans les années 1980 et 1990, les brillants esprits de Carnegie Mellon University étaient sur quelque chose de grand. Ils ont développé des voitures capables de « voir » à l’aide de caméras, les aidant ainsi à naviguer dans les rues animées de la ville. Ces voitures étaient comme des explorateurs qui apprenaient à conduire en regardant autour d’eux.
Puis, un moment marquant est arrivé en 2004, sur fond de défi du désert. Les voitures autonomes sont entrées en scène, tentant une course difficile – une course qu'elles n'ont pas gagnée, mais c'était un début. Considérez-le comme leur terrain d’entraînement pour devenir de meilleurs conducteurs.
Cependant, la véritable avancée s’est produite dans les années 2000 et 2010, lorsque de grandes entreprises comme Tesla, Uberet au Google (Maintenant Waymo) est entré dans le secteur automobile. Google a commencé à tester des voitures autonomes en 2009. En 2015, les voitures de Tesla ont introduit une fonctionnalité leur permettant de se conduire partiellement seules sur certaines routes. Ils pouvaient gérer la direction et rester sur la route sans contrôle humain constant.
À mesure que de plus en plus d’entreprises rejoignaient la course, la concurrence pour créer des voitures entièrement autonomes s’est intensifiée. Imaginez des équipes d’inventeurs s’affrontant pour fabriquer des voitures capables de rouler sans avoir recours à des humains pour les diriger.
Mais l'histoire continue. Nous travaillons toujours à fabriquer des voitures capables de se conduire seules, ce qui changerait notre façon de voyager. Cette aventure est toujours en cours et cela signifie que nous pourrions avoir des voyages plus sûrs et plus faciles, car ces voitures autonomes sophistiquées s'améliorent.
How Do Self-Driving Cars Work?
Les voitures autonomes sont comme des décideurs super intelligents ! Ils utilisent des caméras, des LiDAR, des RADAR, des GPS et des capteurs à inertie pour recueillir des données sur leur environnement. Ensuite, des algorithmes spéciaux appelés algorithmes d’apprentissage en profondeur traitent ces données pour comprendre ce qui se passe autour d’elles. Sur la base de cette compréhension, ils prennent des décisions importantes pour conduire en toute sécurité et en douceur.

Si nous voulons comprendre comment fonctionnent réellement les voitures autonomes, examinons de plus près ces quatre parties présentées dans le diagramme ci-dessus. C'est comme résoudre un puzzle : comprendre chaque pièce nous aidera à avoir une vue d'ensemble du fonctionnement de ces incroyables voitures :
- Perception
- Localisation
- Prédiction
- La prise de décision
- Planification du chemin de haut niveau
- Arbitrage comportemental
- motion Controller
Perception
# 1. Appareil photo
Les caméras sont comme les yeux d'une voiture autonome : elles sont extrêmement importantes ! Ils aident la voiture à savoir ce qui se passe autour d'elle. Ces caméras effectuent différentes tâches, comme déterminer ce que sont les choses, séparer différentes pièces et trouver où se trouve la voiture.
Pour s'assurer que la voiture ne manque de rien, des caméras sont placées partout : à l'avant, à l'arrière, à gauche et à droite. Ces caméras fonctionnent ensemble pour créer une vue d’ensemble de tout ce qui se trouve autour de la voiture. C'est comme la vue spéciale à 360 degrés de la voiture !

Ces caméras ne sont pas seulement destinées au spectacle. Ils sont intelligents. Certains regardent au loin, jusqu'à 200 mètres, pour que la voiture sache ce qui l'attend. D’autres se concentrent sur les choses à proximité afin que la voiture puisse prêter une attention particulière aux détails. Cette équipe de caméras aide la voiture à tout voir et à tout comprendre, comme un ami qui la guide, afin qu'elle puisse conduire en toute sécurité et faire les bons choix.
Parfois, les caméras sont très utiles, comme lors du stationnement, car elles affichent une vue large et aident à faire de bons choix pour conduire prudemment.
Mais l’utilisation de caméras uniquement pour voir les choses pose des problèmes, en particulier par temps difficiles comme le brouillard, les fortes pluies et la nuit. À cette époque, les images des caméras peuvent paraître étranges et désordonnées, ce qui peut être très dangereux.
Pour faire face à ces situations difficiles, nous avons besoin de capteurs spéciaux capables de fonctionner lorsqu'il fait très sombre, voire totalement nocturne. Ils devraient également être capables de mesurer la distance parcourue par les objets sans avoir besoin de la lumière que nous pouvons voir. Lorsque nous plaçons ces capteurs dans les yeux de la voiture (système de perception), la voiture parvient à mieux conduire par mauvais temps ou lorsqu'il est difficile de voir. Ainsi, la voiture peut conduire de manière plus sûre, ce qui est idéal pour tous ceux qui conduisent sur la route.
# 2. LiDAR
LiDAR, qui signifie Light Detection And Ranging, est une technologie sophistiquée qui utilise des lasers pour déterminer la distance parcourue par les objets. Le LiDAR envoie des faisceaux laser et mesure le temps qu’il leur faut pour revenir des objets.

Lorsque le LiDAR et les caméras fonctionnent ensemble, ils aident la voiture à comprendre les choses plus clairement. Il crée une carte 3D de ce qui se trouve autour de la voiture. Ces informations spéciales peuvent ensuite être consultées par des programmes informatiques intelligents, qui aident la voiture à deviner ce que les autres voitures pourraient faire. Ceci est utile lorsque la route est difficile, comme aux carrefours très fréquentés, car la voiture peut surveiller les autres voitures et conduire en toute sécurité.
Cependant, le LiDAR présente des limites qui peuvent poser problème. Bien qu'il fonctionne bien la nuit et dans des environnements sombres, il peut avoir des difficultés dans des conditions d'interférence causées par la pluie ou le brouillard, ce qui peut entraîner des imprécisions dans la perception. Pour résoudre ces problèmes, nous utilisons simultanément des capteurs LiDAR et RADAR. Ces capteurs fournissent des informations supplémentaires qui aident la voiture à comprendre les choses plus clairement. La voiture peut conduire seule, de manière plus sûre et plus efficace.
# 3. RADAR
RADAR, qui signifie Radio Detection and Ranging, est utilisé depuis longtemps dans le quotidien ainsi que par l'armée. Utilisé à l'origine par l'armée pour détecter des objets, le RADAR calcule les distances à l'aide de signaux d'ondes radio. De nos jours, le RADAR est vital dans de nombreuses voitures, notamment celles autonomes.
RADAR est génial car il peut fonctionner dans n'importe quel type de temps et de lumière. Au lieu de lasers, il utilise des ondes radio, ce qui le rend flexible et extrêmement utile. Cependant, RADAR est considéré comme un capteur bruyant, ce qui signifie qu'il peut détecter des obstacles même lorsque la caméra n'en voit aucun.

Le cerveau de la voiture autonome peut être perturbé par tous les signaux supplémentaires du RADAR, que nous appelons « bruit ». Pour résoudre ce problème, la voiture doit nettoyer les informations RADAR afin de pouvoir faire de bons choix.
Nettoyer les données signifie utiliser des astuces spéciales pour distinguer les signaux forts des signaux faibles, comme séparer les éléments importants des éléments moins importants. La voiture utilise une astuce intelligente appelée Fast Fourier Transforms (FFT) pour mieux comprendre les informations.
RADAR et LiDAR donnent des informations sur des points uniques, comme des points sur du papier. Pour mieux comprendre ces points, la voiture utilise quelque chose comme le regroupement. C'est comme lorsque vous rassemblez des choses similaires. La voiture utilise des méthodes statistiques intelligentes, telles que le clustering euclidien ou le clustering K-means, pour combiner des points similaires et les comprendre. Cela rend la voiture capable de conduire de manière plus intelligente et plus sûre.
Localization
Dans les voitures autonomes, les algorithmes de localisation jouent un rôle crucial dans la détermination de la position et de l'orientation du véhicule lors de sa navigation, appelés odométrie visuelle (VO). VO fonctionne en identifiant et en faisant correspondre les points clés dans des images vidéo consécutives.
La voiture examine des points spéciaux dans les informations, comme des repères sur une carte. Après cela, la voiture utilise des statistiques appelées SLAM pour savoir où se trouvent les objets et comment ils se déplacent. Cela aide la voiture à savoir ce qui se passe autour, comme les routes et les gens.

Et pour faire encore mieux, la voiture utilise ce qu’on appelle l’apprentissage profond. C'est comme un ordinateur super intelligent.
Ces astuces permettent à la voiture de très bien comprendre les choses. Les réseaux de neurones comme PoseNet et VLocNet++ exploitent les données ponctuelles pour estimer la position et l'orientation 3D des objets. Ces positions et orientations 3D estimées peuvent ensuite être utilisées pour dériver la sémantique de la scène, comme le montre l'image ci-dessous. Lorsque la voiture utilise des astuces mathématiques et informatiques intelligentes, elle sait où elle se trouve et ce qui l'entoure. Cela permet à la voiture de rouler toute seule en toute sécurité et en douceur.
Prediction
Comprendre les conducteurs humains est en effet une tâche complexe, car elle implique des émotions et des réactions plutôt qu’une simple logique. Parce que nous ne savons pas ce que feront les autres conducteurs, il est crucial pour les voitures autonomes de deviner correctement leurs actions. Cela contribue à garantir la sécurité sur la route.
Imaginez des voitures autonomes ayant des yeux tout autour, comme une vue à 360 degrés. Cela leur permet de voir tout ce qui se passe. Ils utilisent ces informations avec le deep learning. La voiture utilise des techniques intelligentes pour prédire ce que pourraient faire les autres conducteurs. C'est comme jouer à un jeu dans lequel vous planifiez à l'avance pour réussir.

Les capteurs spéciaux des voitures autonomes sont comme leurs yeux. Ils aident les voitures à savoir ce que sont les choses sur les images, à trouver des objets autour d'elles, à savoir où elles se trouvent et à voir où les choses finissent. Cela aide la voiture à déterminer ce qui se trouve à proximité et à faire des choix intelligents.
Pendant la formation, l'apprentissage en profondeur les algorithmes modélisent des informations complexes à partir d’images et de points de données cloud obtenus à partir de LiDAR et de RADAR. Pendant la conduite réelle (inférence), le même modèle aide la voiture à se préparer à d'éventuels mouvements, notamment le freinage, l'arrêt, le ralentissement, le changement de voie, etc.
L’apprentissage profond est comme une aide intelligente pour la voiture. Cela permet à la voiture de comprendre les choses dont elle n'est pas sûre, de déterminer son emplacement et de mieux conduire. Cela permet de conduire en toute sécurité et de se dérouler plus facilement.
Mais la partie la plus délicate consiste à décider de la meilleure action parmi quelques choix. Choisir les bons mouvements nécessite une réflexion approfondie afin que la voiture puisse bien rouler et rester en sécurité.
Decision Making
Les voitures autonomes doivent faire des choix importants dans des situations délicates, mais ce n’est pas facile. En effet, les capteurs ne sont pas toujours corrects et les personnes sur la route peuvent faire des choses inattendues. La voiture doit deviner ce que les autres feront et bouger pour éviter les accidents.
Pour faire des choix, la voiture a besoin de beaucoup d’informations. La voiture collecte ces informations à l’aide de capteurs, puis utilise des algorithmes d’apprentissage profond pour comprendre où se trouvent les choses et prédire ce qui pourrait arriver. La localisation aide la voiture à connaître sa position initiale, tandis que la prédiction génère de multiples actions possibles en fonction de l'environnement.
Cependant, la question demeure : comment la voiture choisit-elle la meilleure action parmi les nombreuses actions prévues ?

Apprentissage par renforcement profond (DRL) est une technique de prise de décision qui utilise un algorithme appelé Processus de décision markovien (MDP). MDP est utile pour deviner comment les gens sur la route pourraient agir à l'avenir. Quand il y a plus de choses qui bougent, les choses deviennent plus compliquées. Cela signifie que la voiture autonome doit réfléchir à encore plus d’actions possibles.
Pour relever le défi consistant à trouver la meilleure solution pour la voiture, le modèle d'apprentissage en profondeur est optimisé à l'aide de l'optimisation bayésienne. Dans certains cas, un cadre combinant un modèle de Markov caché et une optimisation bayésienne est utilisé pour la prise de décision, permettant à la voiture autonome de naviguer efficacement et en toute sécurité dans divers scénarios complexes.

La prise de décision dans les voitures autonomes suit un processus hiérarchique composé de quatre éléments clés :
Planification de chemin ou d'itinéraire: Au début du trajet, la voiture détermine le meilleur itinéraire depuis sa position actuelle jusqu'à la destination souhaitée. Le but est de trouver une solution optimale parmi différents itinéraires possibles.
Arbitrage comportemental: La voiture doit suivre l'itinéraire après l'avoir planifié. La voiture est consciente des objets statiques comme les routes et les carrefours, mais elle est incapable de prévoir les actions exactes des autres conducteurs. Pour gérer cette incertitude, nous utilisons des méthodes intelligentes telles que les processus de décision markoviens (MDP) pour la planification.

Planification de mouvement: Avec l'itinéraire planifié et la couche comportementale déterminant comment le parcourir, le système de planification de mouvement coordonne les mouvements de la voiture. Cela signifie s'assurer que la voiture se déplace d'une manière à la fois sûre et confortable pour les personnes à l'intérieur. Il pense à des choses comme la vitesse à laquelle il va, les changements de voie et ce qui l'entoure.
Contrôle du véhicule: La dernière étape est le contrôle du véhicule, qui exécute la trajectoire de référence générée par le système de planification de mouvement, garantissant que la voiture suit la trajectoire prévue en douceur et en toute sécurité.
En décomposant la prise de décision en ces différentes parties, les voitures autonomes peuvent rouler efficacement et en toute sécurité dans des endroits compliqués. Cela garantit aux passagers un voyage fluide et confortable.
Convolutional Neural Networks
Les réseaux de neurones convolutifs (CNN) sont largement utilisés dans les voitures autonomes en raison de leur capacité à modéliser des informations spatiales, en particulier des images. Les CNN excellent dans l’extraction de caractéristiques à partir d’images, ce qui les rend utiles pour comprendre de nombreuses choses différentes.
Dans un CNN, à mesure que la profondeur du réseau augmente, différentes couches capturent différents modèles. Les premières couches détectent des caractéristiques simples telles que les bords, tandis que les couches plus profondes reconnaissent les caractéristiques plus complexes, telles que les formes d'objets (comme les feuilles des arbres ou les pneus des véhicules). Cette adaptabilité est la raison pour laquelle les CNN constituent un algorithme central dans les voitures autonomes.
Le composant principal d'un CNN est la couche convolutive, qui utilise un noyau convolutif (matrice de filtre) pour traiter les régions locales de l'image d'entrée.

La matrice de filtre est mise à jour pendant la formation pour obtenir des poids significatifs. Une propriété fondamentale des CNN est le partage de poids, où les mêmes paramètres de poids sont utilisés pour représenter différentes transformations, économisant ainsi de l'espace de traitement et permettant diverses représentations de fonctionnalités.
La sortie de la couche convolutive passe généralement par une fonction d'activation non linéaire, comme Sigmoid, Tanh ou ReLU. ReLU est préféré car il converge plus rapidement que les autres. De plus, le résultat passe souvent par une couche de pooling maximum. Cela conserve les détails importants de l’image, comme l’arrière-plan et les textures.
Trois propriétés essentielles des CNN les rendent polyvalents et fondamentaux dans les voitures autonomes :
- Champs récepteurs locaux
- Poids partagés
- Échantillonnage spatial
Ces propriétés réduisent le surajustement et stockent des représentations et des fonctionnalités critiques pour la classification, la segmentation, la localisation, etc.
Voici deux réseaux CNN utilisés par des entreprises pionnières en matière de voitures autonomes :
- HydraNet par Tesla
- ChauffeurNet par Google Waymo
En savoir plus sur Réseaux de neurones convolutionnels.
# 1. HydraNet par Tesla
HydraNet est une architecture dynamique introduite par Ravi et al. en 2018, développé principalement pour la segmentation sémantique des voitures autonomes. Son objectif principal est d'améliorer l'efficacité des calculs lors de l'inférence.
La notion de HydraNet implique d'avoir différents réseaux CNN, appelés branches, affectés à des tâches spécifiques. Chaque branche reçoit diverses entrées et le réseau peut choisir de manière sélective quelles branches exécuter pendant l'inférence, agrégeant finalement les sorties de différentes branches pour prendre une décision finale.
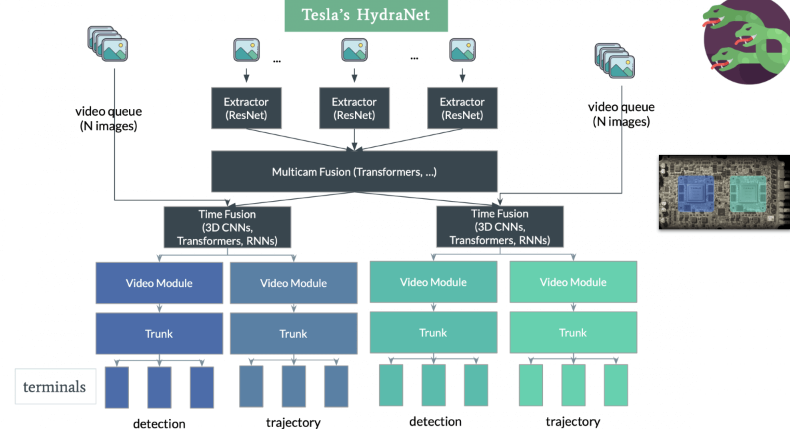
Dans le contexte des voitures autonomes, les entrées peuvent représenter différents aspects de l'environnement, tels que les objets statiques (arbres et barrières routières), les routes et voies, les feux de circulation, etc. Ces entrées sont formées dans des branches distinctes. Lors de l'inférence, le mécanisme de porte décide quelles branches activer et le combineur collecte leurs sorties pour prendre la décision finale.

Tesla a adapté l'architecture HydraNet, en intégrant une structure partagée pour relever les défis liés à la séparation des données pour les tâches individuelles lors de l'inférence. Le backbone partagé, généralement des blocs ResNet-50 modifiés, permet au réseau d'être formé sur les données de tous les objets. Les têtes spécifiques à des tâches basées sur une architecture de segmentation sémantique, comme U-Net, permettent au modèle de prédire les résultats spécifiques à chaque tâche.

HydraNet de Tesla se distingue par sa capacité à projeter une vue à vol d'oiseau, créant une représentation 3D de l'environnement sous n'importe quel angle. Cette dimensionnalité améliorée aide la voiture à une meilleure navigation. Il est remarquable que Tesla y parvienne sans utiliser de capteurs LiDAR. Au lieu de cela, il s’appuie sur seulement deux capteurs : une caméra et un radar. L'efficacité de l'HydraNet de Tesla lui permet de traiter les informations de huit caméras et de générer une perception de la profondeur, démontrant ainsi des capacités impressionnantes sans avoir besoin d'une technologie LiDAR supplémentaire.
# 2. ChauffeurNet par Google Waymo
ChauffeurNet est un réseau neuronal basé sur RNN utilisé par Google Waymo pour entraîner des voitures autonomes à l'aide de l'apprentissage par imitation. Bien qu'il s'appuie principalement sur un RNN pour générer des trajectoires de conduite, il intègre également un composant CNN appelé FeatureNet.
Ce réseau de fonctionnalités convolutionnelles extrait des représentations de fonctionnalités contextuelles partagées par d'autres réseaux et est utilisé pour extraire des fonctionnalités du système de perception.

Le concept derrière ChauffeurNet est de former la voiture autonome en imitant des conducteurs experts grâce à l'apprentissage par imitation. Pour surmonter les limites de l'insuffisance des données de formation réelles, les auteurs de l'article « ChauffeurNet : Apprendre à conduire en imitant le meilleur et en synthétisant le pire » ont introduit des données synthétiques.
Ces données synthétiques introduisent diverses déviations, telles que perturber la trajectoire, ajouter des obstacles et créer des scènes non naturelles. Entraîner la voiture avec des données synthétiques s’est avéré plus efficace que d’utiliser uniquement des données réelles.
Dans ChauffeurNet, le système de perception ne fait pas partie du processus de bout en bout mais agit comme un système de niveau intermédiaire. Cela permet au réseau d'avoir diverses variations d'entrée du système de perception. Le réseau observe une représentation de niveau intermédiaire de la scène à partir des capteurs et, en utilisant cette entrée ainsi que des données synthétiques, il imite le comportement de conduite d'un expert.
En prenant en compte la tâche de perception et en créant une vue plongeante de haut niveau sur l'environnement, ChauffeurNet facilite l'apprentissage par transfert, permettant au réseau de prendre de meilleures décisions basées sur des données réelles et simulées. Le réseau génère des trajectoires de conduite en prédisant de manière itérative des points successifs dans la trajectoire de conduite sur la base des représentations de niveau intermédiaire. Cette approche s’est révélée prometteuse pour former plus efficacement les voitures autonomes, ouvrant la voie à des systèmes de conduite autonomes plus sûrs et plus fiables.
# 3. Processus de décision de Markov partiellement observable utilisé pour les voitures autonomes
Processus de décision de Markov partiellement observable (POMDP) est un cadre mathématique utilisé dans le contexte des voitures autonomes pour prendre des décisions dans des conditions d'incertitude. Dans les scénarios du monde réel, les voitures autonomes disposent souvent d’informations limitées sur leur environnement en raison du bruit des capteurs, des occultations ou des systèmes de perception imparfaits. POMDP est conçu pour gérer une telle observabilité partielle et prendre des décisions optimales en tenant compte à la fois de l'incertitude et des observations disponibles.
Dans un POMDP, l’agent décisionnel opère dans un environnement avec des états partiellement observables. L’agent agit et l’environnement passe de manière probabiliste à de nouveaux états. Cependant, l’agent ne reçoit que des observations partielles ou des informations bruitées sur l’état réel de l’environnement. L'objectif est de trouver une politique qui maximise la récompense cumulée attendue au fil du temps tout en tenant compte de l'incertitude de l'environnement et des observations de l'agent.

Dans le contexte des voitures autonomes, POMDP est particulièrement utile pour des tâches telles que la planification de mouvements, la prédiction de trajectoire et l'interaction avec d'autres usagers de la route. La voiture autonome peut utiliser POMDP pour prendre des décisions concernant les changements de voie, les ajustements de vitesse et les interactions avec les piétons et les autres véhicules, en tenant compte de l'incertitude de l'environnement.
Le POMDP comporte six composants et peut être noté POMDP
M : = (I, S, A, R, P, γ)
où,
I : Observations
S : Ensemble fini d’états
A : Ensemble fini d’actions
R : fonction de récompense
P : fonction de probabilité de transition
γ : facteur d'actualisation pour les récompenses futures.
Les POMDP peuvent être difficiles à calculer en raison de la nécessité de prendre en compte plusieurs états et observations possibles. Cependant, des algorithmes avancés, tels que la planification de l'espace de croyance et les méthodes de Monte Carlo, sont souvent utilisés pour s'approcher efficacement de la politique optimale et permettre une prise de décision en temps réel dans les voitures autonomes.
En intégrant POMDP dans leurs algorithmes de prise de décision, les voitures autonomes peuvent naviguer dans des environnements complexes et incertains plus efficacement et en toute sécurité, en tenant compte de l'incertitude des lectures des capteurs et en prenant des décisions éclairées pour atteindre leurs objectifs.
L'automobile autonome, fonctionnant comme un agent, apprend en interagissant avec l'environnement avec apprentissage par renforcement (RL), une sorte de machine learning. L’état, l’action et la récompense sont les trois variables importantes au cœur de Apprentissage par renforcement profond (DRL).
Région: Décrit la situation actuelle de la voiture autonome à un instant donné, comme sa position sur la route.
Action: Représente tous les mouvements possibles que la voiture peut effectuer, y compris les décisions telles que les changements de voie ou les ajustements de vitesse.
Récompenser: Fournit un retour d'information à la voiture chaque fois qu'elle entreprend une action particulière. La récompense peut être positive ou négative, et le but du DRL est de maximiser les récompenses cumulées.
Contrairement à l’apprentissage supervisé, où l’algorithme reçoit explicitement les actions correctes, DRL apprend en explorant l’environnement et en recevant des récompenses en fonction de ses actions. Le réseau neuronal de la voiture autonome est formé sur des données de perception, qui incluent des caractéristiques extraites par des réseaux neuronaux convolutifs (CNN).
Les algorithmes DRL sont ensuite entraînés sur ces représentations, qui sont des transformations de dimension inférieure de l'entrée, ce qui permet une prise de décision plus efficace lors de l'inférence.
Entraîner des voitures autonomes dans des scénarios du monde réel est dangereux et peu pratique. Au lieu de cela, ils sont formés à Simulateurs, où il n'y a aucun risque pour la sécurité humaine.

Certains simulateurs open source sont :
En combinant les données de perception avec l'apprentissage par renforcement, les voitures autonomes peuvent apprendre à naviguer dans des environnements complexes, à prendre des décisions sûres et optimales et à devenir plus aptes à gérer des scénarios de conduite réels.
QFP
Les véhicules autonomes, communément appelés voitures autonomes, sont des automobiles dotées de capteurs de pointe et d’une intelligence artificielle qui peuvent naviguer et conduire de manière autonome. Ces véhicules évaluent leur environnement et émettent des jugements de conduite à l'aide de caméras, de LiDAR, de RADAR et d'algorithmes sophistiqués.
Dans le développement des automobiles autonomes, la sécurité passe avant tout. Pour garantir qu'ils respectent des réglementations de sécurité élevées, ces véhicules sont soumis à des tests et à des simulations approfondis. Bien que des incidents se soient produits lors des tests, l’objectif ultime est de rendre les voitures autonomes plus sûres que celles conduites par des humains.
Des conditions météorologiques extrêmes, notamment de fortes pluies ou de la neige, pourraient présenter des problèmes pour les automobiles autonomes. Des conditions météorologiques défavorables peuvent réduire la précision des capteurs et nuire à la capacité de conduite. Les ingénieurs tentent constamment d’améliorer le fonctionnement de la technologie dans des conditions météorologiques défavorables.
La légalité des véhicules autonomes varie selon les pays et les lieux. Pour accueillir les véhicules autonomes, de nombreuses juridictions révisent leurs lois et réglementations. Les tests de voitures autonomes et un déploiement limité sont déjà autorisés dans certaines régions.
La plupart des voitures autonomes actuellement disponibles sont au niveau d'automatisation 2 ou 3, où elles peuvent parfois avoir besoin d'une assistance humaine. L’industrie s’efforce cependant d’atteindre des niveaux d’automatisation plus élevés, comme le niveau 4 ou le niveau 5, où l’intervention humaine devient minime, voire inutile.
Conclusion
En conclusion, les voitures autonomes ont la capacité de transformer l’industrie automobile en améliorant l’efficacité et la sécurité des routes. Nous avons examiné tous les composants essentiels qui soutiennent ces voitures autonomes, notamment le LiDAR, le RADAR, les caméras et les algorithmes avancés.
Même si les progrès sont prometteurs, il reste encore d’importants défis à relever. Actuellement, les voitures autonomes sont au niveau 2 sur 5 d’avancement, nécessitant une intervention humaine dans certains scénarios. Cependant, grâce à un dévouement et à une innovation continus, nous nous rapprochons de l’atteinte d’une autonomie totale.
Faits marquants
Algorithmes avancés : Une optimisation plus poussée des algorithmes est cruciale pour améliorer la perception de la route, en particulier dans des conditions difficiles où les marquages routiers et la signalisation peuvent faire défaut.
Affiner la modalité de détection : L’amélioration de la précision et de l’efficacité des modalités de détection pour la cartographie et la localisation contribuera à atteindre des niveaux plus élevés d’autonomie.
Communication de véhicule à véhicule : La création d’un écosystème routier connecté et intelligent sera rendue possible en poursuivant la communication de véhicule à véhicule.
Interaction homme-machine : Encourager l’acceptation par le public des technologies de conduite autonome nécessitera d’examiner et de résoudre les problèmes liés à l’interaction homme-machine.
Perspectives futures: Malgré les difficultés, les réalisations jusqu'à présent sont remarquables et, grâce à une coopération et à des recherches continues, les voitures autonomes offrent le potentiel de fournir un environnement de transport plus sûr et plus efficace pour tous.
Nous sommes tous sur le même chemin vers des voitures autonomes et totalement autonomes. À mesure que nous résolvons les défis et encourageons l’innovation, nous nous rapprochons d’une époque où les véhicules gèrent en douceur nos routes, améliorant ainsi la sécurité, l’environnement et le confort pour tous.
Vous pouvez maintenant en apprendre davantage calcul spatial et son application dans le développement de voitures autonomes.
-
 Sanket SarwadeAuteur
Sanket SarwadeAuteur -
Oucha RomeshÉditeurUsha, rédactrice en chef chez Geekflare, est titulaire d'une maîtrise en applications informatiques. Elle a travaillé comme ingénieur logiciel pendant 6 ans.
Après une pause dans sa carrière, elle s'oriente vers le marketing digital et la gestion de campagnes. Elle travaillait… lire la suite








