Cómo los coches autónomos utilizan la tecnología CNN

Cuando era niño, me encantaba ver películas de dibujos animados con coches que parecían conducirse solos. Me hizo preguntarme si esos autos podrían ser reales y si en su interior habría pequeños robots que los conducirían mágicamente.
A medida que envejecemos, ¡los coches autónomos se están volviendo reales! Estoy realmente fascinado por ellos. ¿Entienden cuándo detenerse ante las señales de alto y los semáforos en rojo, por ejemplo? ¿Pueden siquiera ver animales y personas caminando por la carretera? ¿Y qué pasa con la conducción cuando afuera está todo oscuro o cuando llueve o nieva?

¡Hablemos de coches autónomos! Se trata de coches que pueden conducirse solos sin conductor humano. Empresas como Tesla y Waymo utilizan técnicas informáticas inteligentes, como deep learning, para hacer que estos autos sean súper inteligentes. El aprendizaje profundo ayuda a los automóviles a hacer cosas interesantes, como comprender las señales de tráfico y conducir de forma segura incluso cuando el clima es terrible. ¡Se trata de utilizar tecnología avanzada para dar forma a cómo nos desplazaremos en el futuro!
History
La historia de los automóviles autónomos es similar a una larga y apasionante aventura. Imagínese la década de 1920, cuando los vehículos autónomos todavía eran sólo un sueño para la gente. Una mente inventiva, Francisco Houdina, se destacó por crear un automóvil que seguía líneas en la carretera. Sin embargo, necesitaba cables especiales escondidos debajo de la carretera para guiarlo.

Avanzando hacia las décadas de 1980 y 1990, las mentes brillantes de Carnegie Mellon University estábamos en algo grande. Desarrollaron automóviles que podían “ver” usando cámaras, ayudándolos a navegar por las concurridas calles de la ciudad. Estos coches eran como exploradores que aprenden y descubren cómo conducir mirando a su alrededor.
Luego, en 2004, llegó un momento significativo, con el telón de fondo de un desafío en el desierto. Los coches autónomos entraron en escena e intentaron una dura carrera, una carrera que no ganaron, pero que fue un comienzo. Piense en ello como su campo de entrenamiento para convertirse en mejores conductores.
Sin embargo, el avance real se produjo en las décadas de 2000 y 2010, cuando grandes empresas como Tesla, Uber y Google (Ahora es el Waymo) entró en el sector del automóvil. Google comenzó a probar autos sin conductor en 2009. En 2015, los autos de Tesla introdujeron una característica que les permitía conducir parcialmente solos en ciertas carreteras. Podían manejar el volante y permanecer en la carretera sin un control humano constante.
A medida que más empresas se unieron a la carrera, la competencia para crear vehículos completamente autónomos se intensificó. Imagínese equipos de inventores compitiendo para fabricar automóviles que pudieran conducirse sin necesidad de que los humanos los condujeran.
Pero la historia continúa. Todavía estamos trabajando para fabricar automóviles que puedan conducirse solos, lo que cambiaría nuestra forma de viajar. Esta aventura todavía continúa y significa que podríamos tener viajes más seguros y fáciles porque estos elegantes autos autónomos están mejorando.
How Do Self-Driving Cars Work?
¡Los coches autónomos son como personas que toman decisiones súper inteligentes! Utilizan cámaras, LiDAR, RADAR, GPS y sensores de inercia para recopilar datos sobre su entorno. Luego, algoritmos especiales llamados algoritmos de aprendizaje profundo procesan estos datos para comprender lo que sucede a su alrededor. Con base en este conocimiento, toman decisiones importantes para conducir de manera segura y sin problemas.

Si queremos descubrir cómo funcionan realmente los coches autónomos, echemos un vistazo más de cerca a estas cuatro partes que se muestran en el diagrama anterior. Es como resolver un rompecabezas: comprender cada pieza nos ayudará a tener una visión más amplia de cómo funcionan estos increíbles autos:
- Percepción
- aplicaciones móviles
- Predicción
- Toma de Decisiones
- Planificación de ruta de alto nivel
- Arbitraje de conducta
- controlador de movimiento
Perception
#1. Cámara
Las cámaras son como los ojos de un coche autónomo: ¡son súper importantes! Ayudan al coche a saber lo que sucede a su alrededor. Estas cámaras realizan diferentes trabajos, como descubrir qué son las cosas, separar diferentes partes y encontrar dónde está el automóvil.
Para garantizar que el automóvil no se pierda nada, tiene cámaras colocadas por todas partes: adelante, atrás, izquierda y derecha. Estas cámaras trabajan juntas para obtener una imagen grande de todo lo que rodea al automóvil. ¡Es como la vista especial de 360 grados del auto!

Estas cámaras no son sólo para mostrar. Son inteligentes. Algunos miran a lo lejos, hasta 200 metros, para que el coche sepa lo que se avecina. Otros se centran en cosas cercanas para que el auto pueda prestar mucha atención a los detalles. Este equipo de cámaras ayuda al automóvil a ver y comprender todo, como un amigo que lo guía, para que pueda conducir con seguridad y tomar buenas decisiones.
A veces, las cámaras son muy útiles, como al estacionar, porque muestran una vista amplia y ayudan a tomar buenas decisiones para conducir con cuidado.
Pero usar cámaras únicamente para ver cosas presenta problemas, especialmente en condiciones climáticas adversas como niebla, lluvia intensa y de noche. En estos tiempos, las imágenes de las cámaras pueden verse raras y desordenadas, lo que puede resultar realmente inseguro.
Para afrontar estas situaciones desafiantes, necesitamos sensores especiales que puedan funcionar cuando está muy oscuro o incluso totalmente de noche. También deberían poder medir qué tan lejos están las cosas sin necesidad de luz que podamos ver. Cuando colocamos estos sensores en los ojos del automóvil (sistema de percepción), el automóvil mejora su conducción con mal tiempo o cuando es difícil ver. Por lo tanto, el automóvil puede conducirse de manera más segura, lo cual es excelente para todos los que conducen en la carretera.
#2. LiDAR
LiDAR, que significa detección y alcance de luz, es una tecnología sofisticada que utiliza láseres para determinar qué tan lejos están las cosas. LiDAR envía rayos láser y mide cuánto tardan en regresar de las cosas.

Cuando LiDAR y las cámaras trabajan juntas, ayudan al automóvil a comprender las cosas con mayor claridad. Crea un mapa en 3D de lo que hay alrededor del coche. Esta información especial puede luego ser analizada por programas informáticos inteligentes, que ayudan al automóvil a adivinar qué podrían hacer otros automóviles. Esto es útil cuando la carretera es complicada, como en cruces muy transitados, porque el coche puede observar a los demás coches y conducir con seguridad.
Sin embargo, LiDAR tiene limitaciones que pueden resultar problemáticas. Si bien funciona bien de noche y en ambientes oscuros, puede tener problemas en condiciones con interferencias de lluvia o niebla, lo que podría provocar imprecisiones en la percepción. Para solucionar estos problemas utilizamos sensores LiDAR y RADAR al mismo tiempo. Estos sensores proporcionan información adicional que ayuda al coche a entender las cosas con mayor claridad. El coche puede conducirse solo de una forma mejor y más segura.
#3. RADAR
RADAR, que significa Radio Detección y Rango, se ha utilizado durante mucho tiempo en la vida cotidiana y también en el ejército. Originalmente utilizado por el ejército para detectar objetos, RADAR calcula distancias utilizando señales de ondas de radio. Hoy en día, el RADAR es vital en muchos coches, especialmente en los autónomos.
RADAR es fantástico porque puede funcionar en cualquier tipo de clima y luz. En lugar de láseres, utiliza ondas de radio, lo que lo hace flexible y súper útil. Sin embargo, el RADAR se considera un sensor ruidoso, lo que significa que puede detectar obstáculos incluso cuando la cámara no ve ninguno.

El cerebro de un vehículo autónomo puede confundirse con todas las señales adicionales del RADAR, lo que llamamos "ruido". Para solucionar este problema, el automóvil necesita limpiar la información del RADAR para poder tomar buenas decisiones.
Limpiar los datos significa utilizar trucos especiales para distinguir las señales fuertes de las débiles, como separar las cosas importantes de las no tan importantes. El coche utiliza un truco inteligente llamado Transformada Rápida de Fourier (FFT) para comprender aún mejor la información.
RADAR y LiDAR brindan información sobre puntos individuales, como puntos en papel. Para entender mejor estos puntos, el coche utiliza algo parecido a una agrupación. Es como cuando juntas cosas similares. El automóvil utiliza métodos estadísticos inteligentes, como el agrupamiento euclidiano o el agrupamiento de medias K, para combinar puntos similares y comprenderlos. Esto hace que el coche pueda conducir de forma más inteligente y segura.
Localization
En los vehículos autónomos, los algoritmos de localización desempeñan un papel crucial a la hora de determinar la posición y orientación del vehículo mientras navega, lo que se conoce como odometría visual (VO). VO funciona identificando y haciendo coincidir puntos clave en fotogramas de vídeo consecutivos.
El coche mira puntos especiales en la información, como marcas en un mapa. Después de eso, el coche utiliza estadísticas llamadas SLAM para saber dónde están las cosas y cómo se mueven. Esto ayuda al automóvil a saber lo que hay alrededor, como las carreteras y las personas.

Y para hacerlo aún mejor, el coche utiliza algo llamado aprendizaje profundo. Es como una computadora súper inteligente.
Estos trucos hacen que el coche entienda muy bien las cosas. Las redes neuronales como PoseNet y VLocNet++ aprovechan los datos de puntos para estimar la posición 3D y la orientación de los objetos. Estas posiciones y orientaciones 3D estimadas se pueden utilizar para derivar la semántica de la escena, como se demuestra en la imagen siguiente. Cuando el automóvil utiliza matemáticas y trucos informáticos inteligentes, sabe dónde está y qué hay a su alrededor. Esto ayuda a que el automóvil se conduzca de forma segura y fluida por sí solo.
Prediction
Comprender los impulsores humanos es, en efecto, una tarea compleja, ya que implica emociones y reacciones en lugar de una lógica sencilla. Como no sabemos qué harán otros conductores, es crucial que los vehículos autónomos hagan buenas conjeturas sobre sus acciones. Esto ayuda a garantizar la seguridad en la carretera.
Imagine coches autónomos con ojos alrededor, como una vista de 360 grados. Esto les permite ver todo lo que sucede. Usan esta información con aprendizaje profundo. El coche utiliza técnicas inteligentes para predecir lo que podrían hacer otros conductores. Es similar a jugar un juego en el que planeas hacerlo bien con anticipación.

Los sensores especiales de los vehículos autónomos son como sus ojos. Ayudan a los autos a saber qué cosas hay en las imágenes, encontrar cosas a su alrededor, saber dónde están y ver dónde terminan las cosas. Esto ayuda al automóvil a descubrir qué hay cerca y tomar decisiones inteligentes.
Durante el entrenamiento, deep learning Los algoritmos modelan información compleja a partir de imágenes y puntos de datos de nubes obtenidos de LiDAR y RADAR. Durante la conducción real (inferencia), el mismo modelo ayuda al automóvil a prepararse para posibles movimientos, como frenar, detenerse, reducir la velocidad, cambiar de carril y más.
El aprendizaje profundo es como una ayuda inteligente para el coche. Esto hace que el automóvil comprenda cosas de las que no está seguro, determine su ubicación y conduzca mejor. Esto mantiene la conducción segura y hace que sea más suave.
Pero la parte complicada es decidir la mejor acción entre algunas opciones. Elegir los movimientos correctos requiere pensar detenidamente para que el automóvil pueda conducirse bien y mantenerse seguro.
Decision Making
Los coches autónomos tienen que tomar decisiones importantes en situaciones complicadas, pero no es fácil. Esto se debe a que es posible que los sensores no siempre sean correctos y las personas en la carretera pueden hacer cosas inesperadas. El coche debe adivinar lo que harán los demás y moverse para evitar choques.
Para tomar decisiones, el coche necesita mucha información. El automóvil recopila esta información mediante sensores y luego utiliza algoritmos de aprendizaje profundo para comprender dónde están las cosas y predecir qué podría suceder. La localización ayuda al coche a conocer su posición inicial, mientras que la predicción genera múltiples acciones posibles en función del entorno.
Sin embargo, la pregunta sigue siendo: ¿cómo elige el coche la mejor acción entre las muchas previstas?

Aprendizaje por refuerzo profundo (DRL) es una técnica para tomar decisiones y utiliza un algoritmo llamado Proceso de decisión de Markov (MDP). MDP es útil para adivinar cómo podrían actuar las personas en la carretera en el futuro. Cuando hay más cosas moviéndose, las cosas se complican más. Esto significa que el vehículo autónomo tiene que pensar en aún más acciones posibles.
Para abordar el desafío de encontrar el mejor movimiento para el automóvil, el modelo de aprendizaje profundo se optimiza mediante optimización bayesiana. En algunos casos, se emplea un marco que combina un modelo oculto de Markov y una optimización bayesiana para la toma de decisiones, lo que permite que el vehículo autónomo navegue de manera efectiva y segura en varios escenarios complejos.

La toma de decisiones en los vehículos autónomos sigue un proceso jerárquico con cuatro componentes clave:
Planificación de ruta o ruta: Al inicio del viaje, el coche determina la mejor ruta desde su posición actual hasta el destino deseado. El objetivo es encontrar una solución óptima entre varias rutas posibles.
Arbitraje de conducta: El coche debe girar por la ruta después de planificarla. El coche es consciente de objetos estáticos como carreteras y cruces, pero no puede prever las acciones exactas de otros conductores. Para manejar esta incertidumbre, utilizamos métodos inteligentes como los procesos de decisión de Markov (MDP) para la planificación.

Planificación de movimiento: Con la ruta planificada y la capa de comportamiento determinando cómo navegarla, el sistema de planificación de movimiento coordina los movimientos del automóvil. Esto significa asegurarse de que el automóvil se mueva de una manera que sea segura y cómoda para las personas que están dentro. Piensa en cosas como la velocidad a la que va, los cambios de carril y lo que hay a su alrededor.
Control de vehículos: El último paso es el control del vehículo, que ejecuta la ruta de referencia generada por el sistema de planificación de movimiento, asegurando que el automóvil siga la trayectoria prevista de manera suave y segura.
Al dividir la toma de decisiones en estas diferentes partes, los vehículos autónomos pueden conducir bien y de forma segura en lugares complicados. Esto asegura que los pasajeros tengan un viaje suave y cómodo.
Convolutional Neural Networks
Las redes neuronales convolucionales (CNN) se utilizan ampliamente en vehículos autónomos debido a su capacidad para modelar información espacial, en particular imágenes. Las CNN se destacan por extraer características de las imágenes, lo que las hace útiles para descubrir muchas cosas diferentes.
En una CNN, a medida que aumenta la profundidad de la red, diferentes capas capturan patrones variables. Las primeras capas detectan características simples como bordes, mientras que las capas más profundas reconocen otras más complejas, como formas de objetos (como hojas de árboles o neumáticos de vehículos). Esta adaptabilidad es la razón por la que las CNN son un algoritmo central en los vehículos autónomos.
El componente central de una CNN es la capa convolucional, que utiliza un núcleo convolucional (matriz de filtro) para procesar regiones locales de la imagen de entrada.

La matriz de filtro se actualiza durante el entrenamiento para obtener pesos significativos. Una propiedad fundamental de las CNN es el peso compartido, donde se utilizan los mismos parámetros de peso para representar diferentes transformaciones, ahorrando espacio de procesamiento y permitiendo diversas representaciones de características.
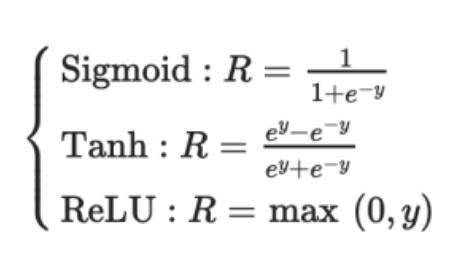
La salida de la capa convolucional generalmente pasa a través de una función de activación no lineal, como Sigmoid, Tanh o ReLU. Se prefiere ReLU porque converge más rápido que los demás. Además, el resultado suele pasar por una capa de agrupación máxima. Esto mantiene los detalles importantes de la imagen, como el fondo y las texturas.
Tres propiedades esenciales de las CNN las hacen versátiles y fundamentales en los vehículos autónomos:
- Campos receptivos locales
- Pesos compartidos
- Muestreo espacial
Estas propiedades reducen el sobreajuste y almacenan representaciones y características críticas cruciales para la clasificación, segmentación, localización y más de imágenes.
Aquí hay dos redes de CNN utilizadas por empresas pioneras en vehículos autónomos:
- HydraNet de Tesla
- ChauffeurNet de Google Waymo
Aprenda más sobre Redes neuronales convolucionales.
#1. HydraNet de Tesla
HydraNet es una arquitectura dinámica introducida por Ravi et al. en 2018, desarrollado principalmente para la segmentación semántica en vehículos autónomos. Su objetivo clave es mejorar la eficiencia computacional durante la inferencia.
El concepto de HidraNet Implica tener diferentes redes CNN, llamadas sucursales, asignadas a tareas específicas. Cada rama recibe varias entradas y la red puede elegir selectivamente qué ramas ejecutar durante la inferencia y, en última instancia, agregar las salidas de diferentes ramas para tomar una decisión final.
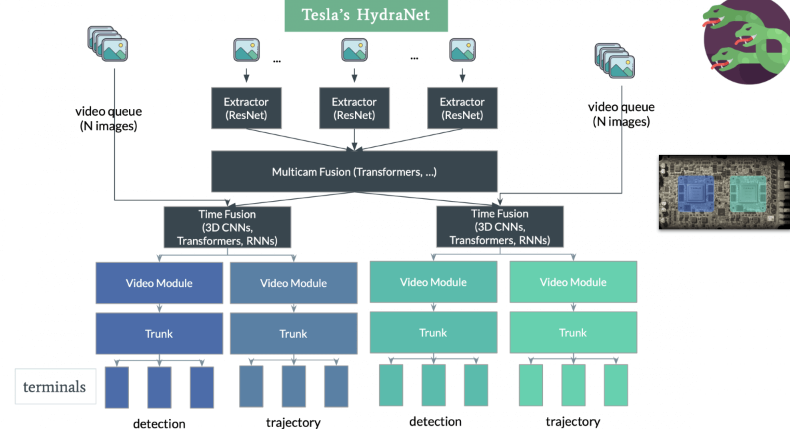
En el contexto de los vehículos autónomos, las entradas pueden representar diferentes aspectos del entorno, como objetos estáticos (árboles y barandillas), carreteras y carriles, semáforos, etc. Estas entradas se entrenan en ramas separadas. Durante la inferencia, el mecanismo de puerta decide qué ramas activar y el combinador recopila sus salidas para tomar la decisión final.

Tesla ha adaptado la arquitectura HydraNet, incorporando una columna vertebral compartida para abordar los desafíos en la segregación de datos para tareas individuales durante la inferencia. La columna vertebral compartida, generalmente bloques ResNet-50 modificados, permite que la red se entrene con los datos de todos los objetos. Los cabezales específicos de tareas basados en una arquitectura de segmentación semántica, como U-Net, permiten que el modelo prediga resultados específicos de cada tarea.

HydraNet de Tesla destaca por su capacidad de proyectar una vista aérea, creando una representación 3D del entorno desde cualquier ángulo. Esta dimensionalidad mejorada ayuda al automóvil a navegar mejor. Sorprendentemente, Tesla logra esto sin utilizar sensores LiDAR. En cambio, se basa sólo en dos sensores: una cámara y un radar. La eficiencia de HydraNet de Tesla le permite procesar información de ocho cámaras y generar percepción de profundidad, demostrando capacidades impresionantes sin necesidad de tecnología LiDAR adicional.
#2. ChauffeurNet de Google Waymo
ChauffeurNet es una red neuronal basada en RNN utilizada por Google Waymo para entrenar vehículos autónomos mediante el aprendizaje por imitación. Si bien se basa principalmente en un RNN para generar trayectorias de conducción, también incorpora un componente CNN conocido como CaracterísticaNet.
Esta red de características convolucionales extrae representaciones de características contextuales compartidas por otras redes y se utiliza para extraer características del sistema de percepción.

El concepto detrás de ChauffeurNet es entrenar el vehículo autónomo imitando a conductores expertos mediante el aprendizaje por imitación. Para superar la limitación de datos insuficientes sobre entrenamiento en el mundo real, los autores del artículo “ChauffeurNet: aprender a conducir imitando lo mejor y sintetizando lo peor” introdujeron datos sintéticos.
Estos datos sintéticos introducen varias desviaciones, como perturbar la trayectoria, agregar obstáculos y crear escenas antinaturales. Se descubrió que entrenar el coche con datos sintéticos era más eficiente que utilizar únicamente datos reales.
En ChauffeurNet, el sistema de percepción no forma parte del proceso de un extremo a otro, sino que actúa como un sistema de nivel medio. Esto permite que la red tenga varias variaciones de entrada del sistema de percepción. La red observa una representación de nivel medio de la escena procedente de los sensores y, utilizando esta información junto con datos sintéticos, imita el comportamiento de conducción experto.
Al tener en cuenta la tarea de percepción y crear una vista aérea de alto nivel del entorno, ChoferNet facilita la transferencia de aprendizaje, lo que permite a la red tomar mejores decisiones basadas en datos reales y simulados. La red genera trayectorias de conducción prediciendo de forma iterativa puntos sucesivos en la ruta de conducción en función de las representaciones de nivel medio. Este enfoque se ha mostrado prometedor en el entrenamiento de vehículos autónomos de manera más efectiva, abriendo un camino hacia sistemas de conducción autónoma más seguros y confiables.
#3. Proceso de decisión de Markov parcialmente observable utilizado para vehículos autónomos
Proceso de decisión de Markov parcialmente observable (POMDP) es un marco matemático utilizado en el contexto de los vehículos autónomos para tomar decisiones en condiciones de incertidumbre. En escenarios del mundo real, los vehículos autónomos a menudo tienen información limitada sobre su entorno debido al ruido de los sensores, oclusiones o sistemas de percepción imperfectos. POMDP está diseñado para manejar dicha observabilidad parcial y tomar decisiones óptimas considerando tanto la incertidumbre como las observaciones disponibles.
En un POMDP, el agente que toma decisiones opera en un entorno con estados parcialmente observables. El agente actúa y el entorno pasa a nuevos estados de forma probabilística. Sin embargo, el agente sólo recibe observaciones parciales o información ruidosa sobre el verdadero estado del medio ambiente. El objetivo es encontrar una política que maximice la recompensa acumulada esperada a lo largo del tiempo considerando la incertidumbre en el entorno y las observaciones del agente.

En el contexto de los vehículos autónomos, POMDP es particularmente útil para tareas como la planificación del movimiento, la predicción de trayectorias y la interacción con otros usuarios de la vía. El automóvil autónomo puede utilizar POMDP para tomar decisiones sobre cambios de carril, ajustes de velocidad e interacciones con peatones y otros vehículos, considerando la incertidumbre del entorno circundante.
El POMDP tiene seis componentes y puede denominarse POMDP.
M:= (I, S, A, R, P, γ)
dónde,
I: Observaciones
S: conjunto finito de estados
A: conjunto finito de acciones
R: función de recompensa
P: función de probabilidad de transición
γ: factor de descuento para recompensas futuras.
Los POMDP pueden ser un desafío computacional debido a la necesidad de considerar múltiples estados y observaciones posibles. Sin embargo, a menudo se emplean algoritmos avanzados, como la planificación del espacio de creencias y los métodos de Monte Carlo, para aproximar de manera eficiente la política óptima y permitir la toma de decisiones en tiempo real en vehículos autónomos.
Al incorporar POMDP en sus algoritmos de toma de decisiones, los vehículos autónomos pueden navegar en entornos complejos e inciertos de manera más efectiva y segura, considerando la incertidumbre en las lecturas de los sensores y tomando decisiones informadas para lograr los objetivos previstos.
El automóvil autónomo, funcionando como agente, aprende interactuando con el entorno con aprendizaje reforzado (RL), una especie de aprendizaje automático. Estado, acción y recompensa son las tres variables importantes en el núcleo de Aprendizaje por refuerzo profundo (DRL).
Estado: Describe la situación actual del vehículo autónomo en un momento dado, como su posición en la carretera.
Tarjetas, flyers, carteles personalizados: Representa todos los movimientos posibles que puede realizar el coche, incluidas decisiones como cambios de carril o ajustes de velocidad.
Gana dinero: proporciona información al automóvil cada vez que realiza una acción en particular. La recompensa puede ser positiva o negativa y el objetivo de DRL es maximizar las recompensas acumuladas.
A diferencia del aprendizaje supervisado, donde al algoritmo se le dan explícitamente las acciones correctas, DRL aprende explorando el entorno y recibiendo recompensas basadas en sus acciones. La red neuronal del automóvil autónomo se entrena con datos de percepción, que incluyen características extraídas por redes neuronales convolucionales (CNN).
Luego, los algoritmos DRL se entrenan en estas representaciones, que son transformaciones de menor dimensión de la entrada, lo que resulta en una toma de decisiones más eficiente durante la inferencia.
Entrenar vehículos autónomos en escenarios del mundo real es peligroso y poco práctico. En cambio, están capacitados en Simuladores, donde no exista riesgo para la seguridad humana.

Algunos simuladores de código abierto son:
Al combinar datos de percepción con aprendizaje reforzado, los vehículos autónomos pueden aprender a navegar en entornos complejos, tomar decisiones seguras y óptimas y volverse más hábiles en el manejo de escenarios de conducción del mundo real.
Preguntas Frecuentes
Los vehículos autónomos, comúnmente conocidos como vehículos autónomos, son automóviles con sensores de última generación e inteligencia artificial que pueden navegar y conducir por sí solos. Estos vehículos evalúan su entorno y toman decisiones de conducción utilizando cámaras, LiDAR, RADAR y algoritmos sofisticados.
En el desarrollo de automóviles autónomos, la seguridad es lo primero. Para garantizar que cumplen con estrictas normas de seguridad, estos vehículos se someten a pruebas y simulaciones exhaustivas. Aunque ha habido incidentes durante las pruebas, el objetivo final es hacer que los coches autónomos sean más seguros que los conducidos por humanos.
Las condiciones climáticas extremas, incluidas fuertes lluvias o nieve, podrían presentar problemas para los automóviles autónomos. El clima desfavorable puede reducir la precisión de los sensores y afectar la capacidad de conducción. Los ingenieros intentan constantemente que la tecnología funcione mejor en condiciones climáticas adversas.
La legalidad de los vehículos autónomos varía según el país y la ubicación. Para dar cabida a los vehículos autónomos, muchas jurisdicciones están revisando sus leyes y reglamentos. En algunas zonas ya se permiten las pruebas de vehículos autónomos y su despliegue limitado.
La mayoría de los vehículos autónomos disponibles actualmente tienen un nivel de automatización 2 o 3, donde a veces pueden necesitar asistencia humana. La industria, sin embargo, se esfuerza por alcanzar niveles más altos de automatización, como el nivel 4 o el nivel 5, donde la intervención humana se vuelve mínima o innecesaria.
Para Concluir
En conclusión, los vehículos autónomos tienen la capacidad de transformar la industria automotriz al mejorar la eficiencia y la seguridad vial. Analizamos todos los componentes esenciales que respaldan estos automóviles autónomos, incluidos LiDAR, RADAR, cámaras y algoritmos avanzados.
Si bien los avances han sido prometedores, todavía quedan importantes desafíos que abordar. Actualmente, los vehículos autónomos se encuentran en el nivel 2 del nivel 5 de avance, lo que requiere intervención humana en ciertos escenarios. Sin embargo, a través de una dedicación e innovación continuas, estamos cada vez más cerca de lograr la autonomía total.
Puntos clave
Algoritmos avanzados: Una mayor optimización de los algoritmos es crucial para mejorar la percepción de la carretera, especialmente en condiciones difíciles donde pueden faltar marcas y señales viales.
Modalidad de detección de refinamiento: Mejorar la precisión y eficiencia de las modalidades de detección para el mapeo y la localización será fundamental para lograr mayores niveles de autonomía.
Comunicación vehículo a vehículo: La creación de un ecosistema vial inteligente y vinculado será posible gracias a la comunicación entre vehículos.
Interacción hombre-máquina: Fomentar la aceptabilidad pública de las tecnologías de conducción autónoma requerirá examinar y abordar cuestiones relacionadas con la interacción hombre-máquina.
Perspectivas de futuro: A pesar de las dificultades, los logros hasta ahora son notables y, con la cooperación y la investigación constantes, los vehículos autónomos ofrecen el potencial de proporcionar un entorno de transporte más seguro y eficaz para todos.
Todos estamos en el mismo camino hacia vehículos autónomos y completamente autónomos. A medida que resolvemos desafíos y estimulamos la innovación, nos acercamos a un momento en el que los vehículos gestionarán sin problemas nuestras carreteras, mejorando la seguridad, el medio ambiente y la comodidad para todos.
Ahora puedes aprender sobre computación espacial y su aplicación en el desarrollo de vehículos autónomos.
-
 Sanket SarwadeAutor
Sanket SarwadeAutor -
Usha RomeshEditoraUsha, editora en jefe de Geekflare, tiene una maestría en aplicaciones informáticas. Ha trabajado como ingeniera de software durante 6 años.
Después de una pausa en su carrera, pasó al marketing digital y la gestión de campañas. Ella trabajó… LEER MÁS








